Из-за большого количества различных проектов, на записи в блоге не хватает времени. Сегодня расскажу об одном из них. Это система предупреждения фронтального столкновения — FCW (Forward Collision Warning). В отличие от FCM, она не пытается остановить автомобиль, а лишь привлекает внимание водителя. Более упрощенный вариант был выбран из-за отсутствия оригинальной системы FCM для автомобилей платформы Lancer X. Конкретнее — из-за отсутствия блока ABS с такой поддержкой.
В качестве детектора я решил использовать популярную модель производства Continental — SRL121.
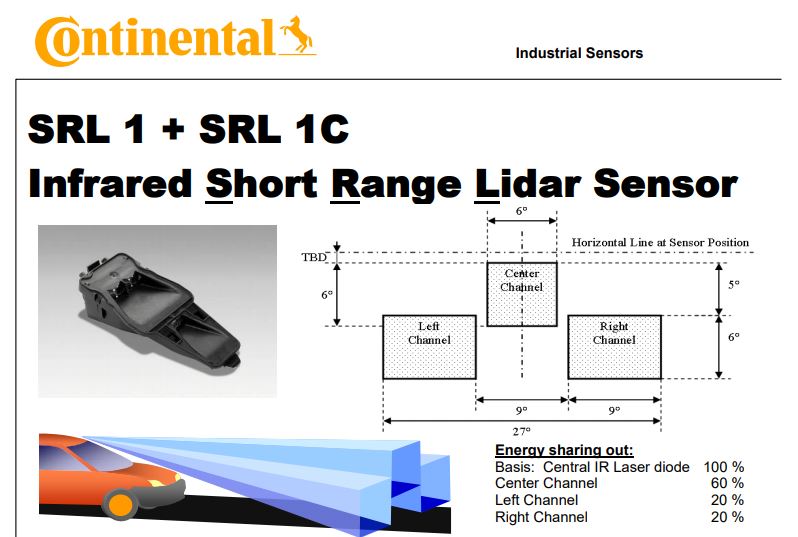
Это лидар (в отличие от радара, лидар использует не радиоизлучение, а световые волны) с тремя сенсорами, действующими на растоянии до 13.5 метров (на самом деле, из-за ограничений прошивки, максимальная дальность составляет чуть менее 13 метров). Эта модель устанавливается на многие автомобили — VW, Volvo, Mazda и др. Я выбрал вариант от Mitsubishi EK-Wagon, так как это сильно упрощает исследование его работы.


После подключения на столе разобрался с основным форматом кан-сообщений. Затем смастерил проводку для подключения в автомобиле и подправил прошивку своего контроллера приборной панели. За основу взял рисунок адаптивного круиз-контроля от Аута-3.

Для тестов просто приклеил сенсор скотчем к стеклу.


Сейчас на приборную панель выводится информация о расстоянии до цели, локальная скорость и время отставания. В общем-то, вычислить скорость цели и время сближения уже не составляет особых сложностей. При уменьшении времени сближения ниже заданного порога, будем рисовать картинку и оповещать звуковым сигналом. Но это чуть позже.
Небольшое видео


