Установленная система кругового обзора разрабатывалась для автомобилей Японии — Делики Д5 и Аутлэндера ХЛ. В связи с этим есть несколько проблем адаптации этой системы на автомобили других рынков.
А именно: необходимость указания правильного кода автомобиля в настройках системы и правильная прошивка MMCS для передачи координат нажатия на экран и автоматического переключения магнитолы в режим отображения камер.
Первая проблема решается установкой кан-фильтра перед блоком камер или же, как делал я, сменой типа автомобиля в етаксе, что влечет за собой замену блока АБС на соответствующую модель.
Со второй проблемой все сложнее: можно установить японскую прошивку, но тогда не будет работать навигация и все меню будет на японском, либо можно смириться с невозможностью управлять блоком камер с магнитолы, а переключение осуществлять с помощью дополнительного реле. Но даже в таком случае наблюдается нестабильная работа блока из-за неверных сообщений в кан-шине.
Чтобы уменьшить количество недочетов, было решено разобраться с обменом по кан-шине и сделать контроллер для возможности запуска кругового обзора вне зависимости от автомобиля.
С передачей координат нажатий на экран я уже разбирался. К сожалению, на данный момент не удалось транслировать нажатия на русской прошивке. А вот обмен с другими блоками пока никто не изучал.
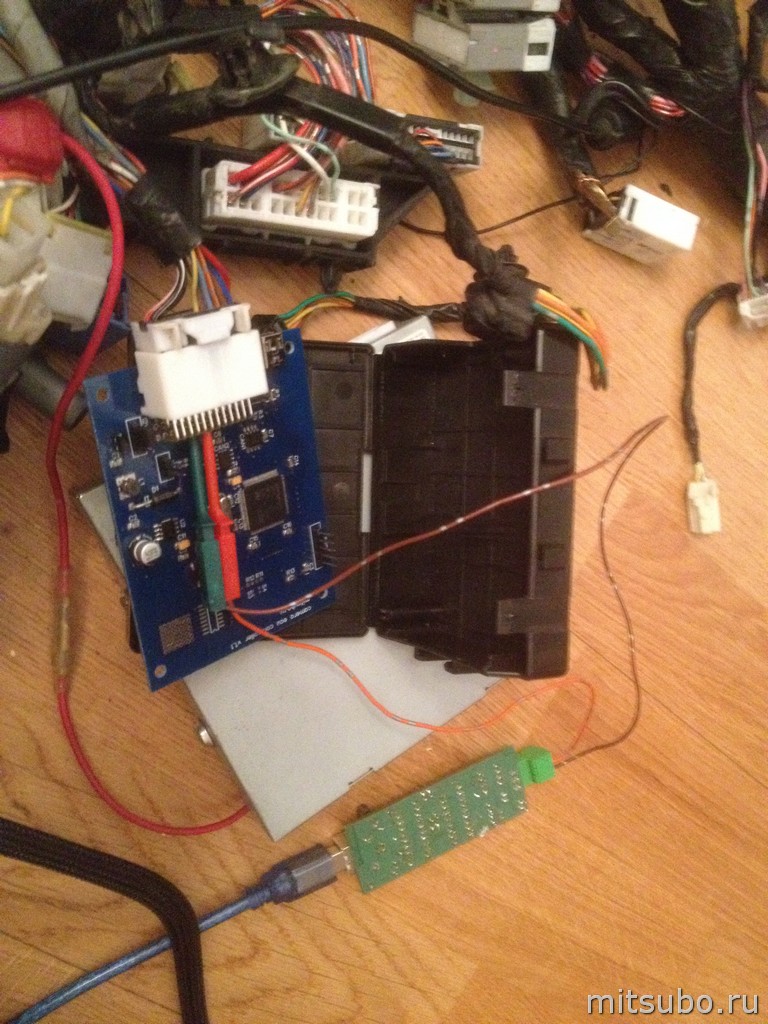
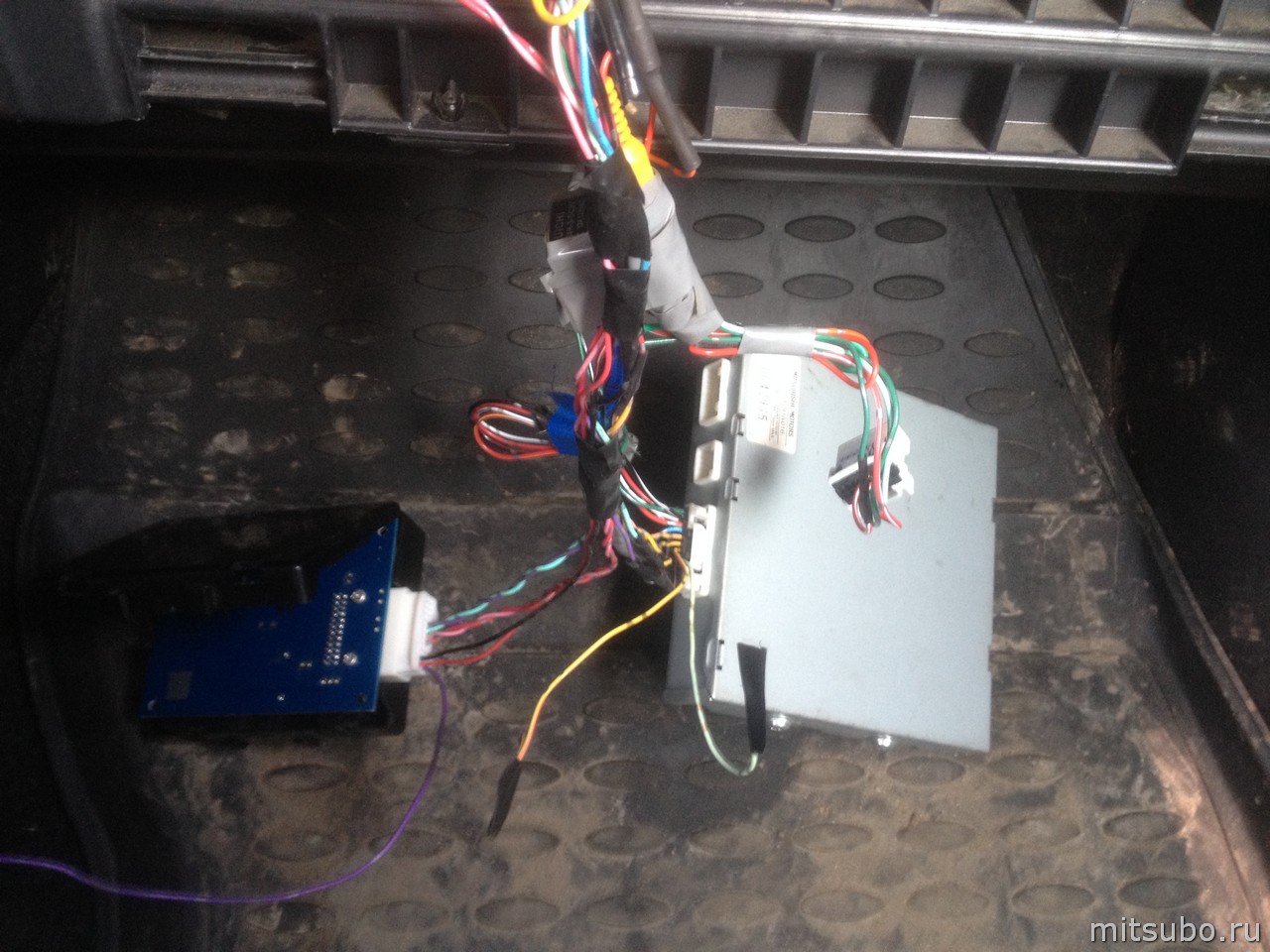
Снял блок камер, магнитолу и подключил все «на столе». На столе не получилось, подключил на полу. Очень пригодилась купленная когда-то подторпедная проводка от Делики.


Блок камер не запустился. Помимо етакса пришлось добавить датчик положения руля, блок управления вариатором, двигателем и заодно блок кос.
Пару вечеров занимался исследованиями и в итоге отсеял все ненужное и понял что именно нужно камерам. Пришло время писать прошивку для контроллера. Сама железка у меня уже была изготовлена ранее, я с ней тестировал блок кругового обзора от ЕК-Вагона. Изготовлена она под форм-фактор штатного блока парктроника, что очень удобно, так как он имеет тот же разъем.
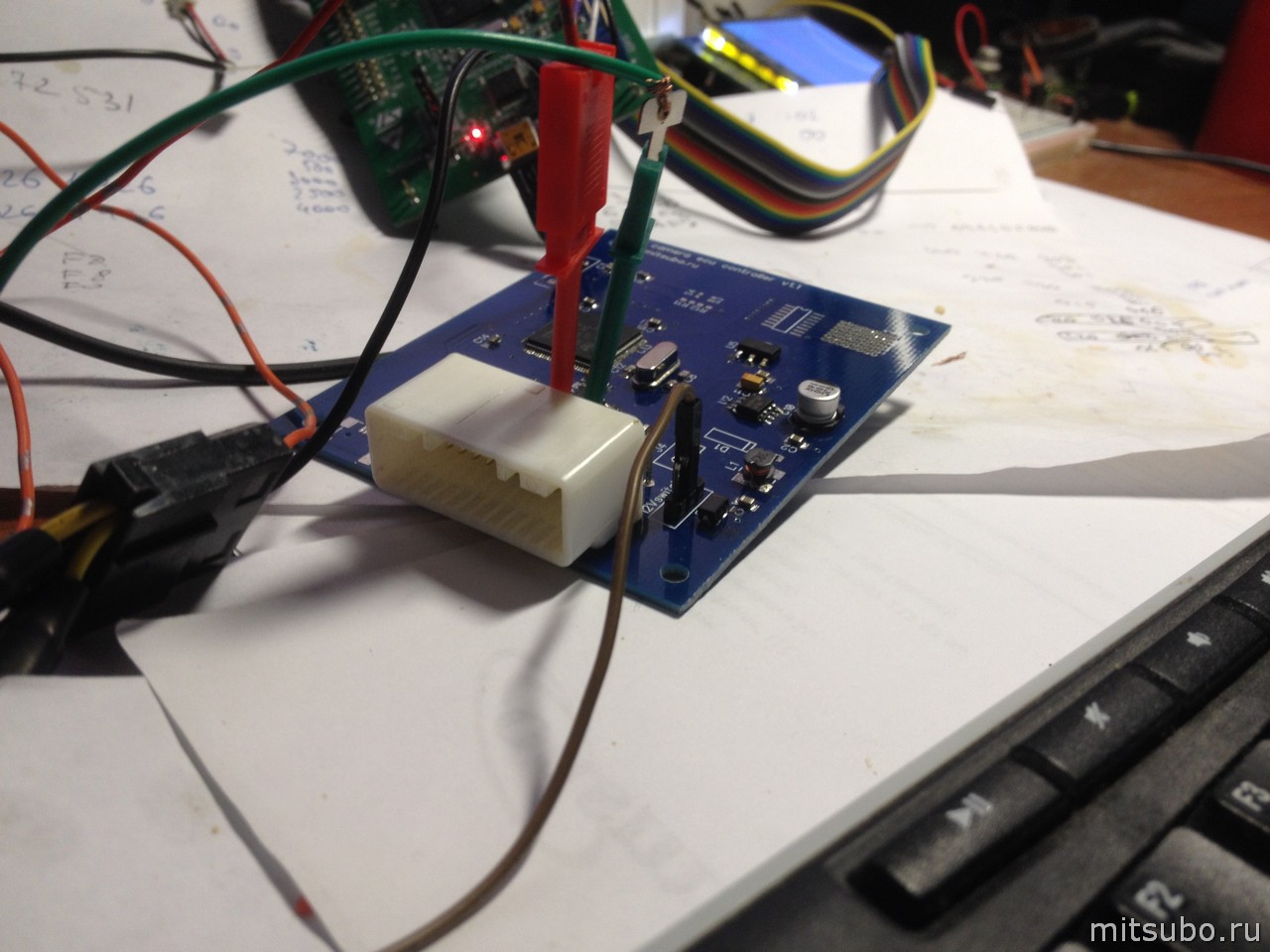
Подключил его в разрыв кан-шины.
Кроме имитации нужных блоков управления, решил сделать возможность регулировки динамических линий парковки. Камера у Делики располагается выше, из-за чего динамические линии отображаются неверно. Написал обработку датчика положения руля с возможностью настройки по кан-шине — не перепрошивать же каждый раз блок.
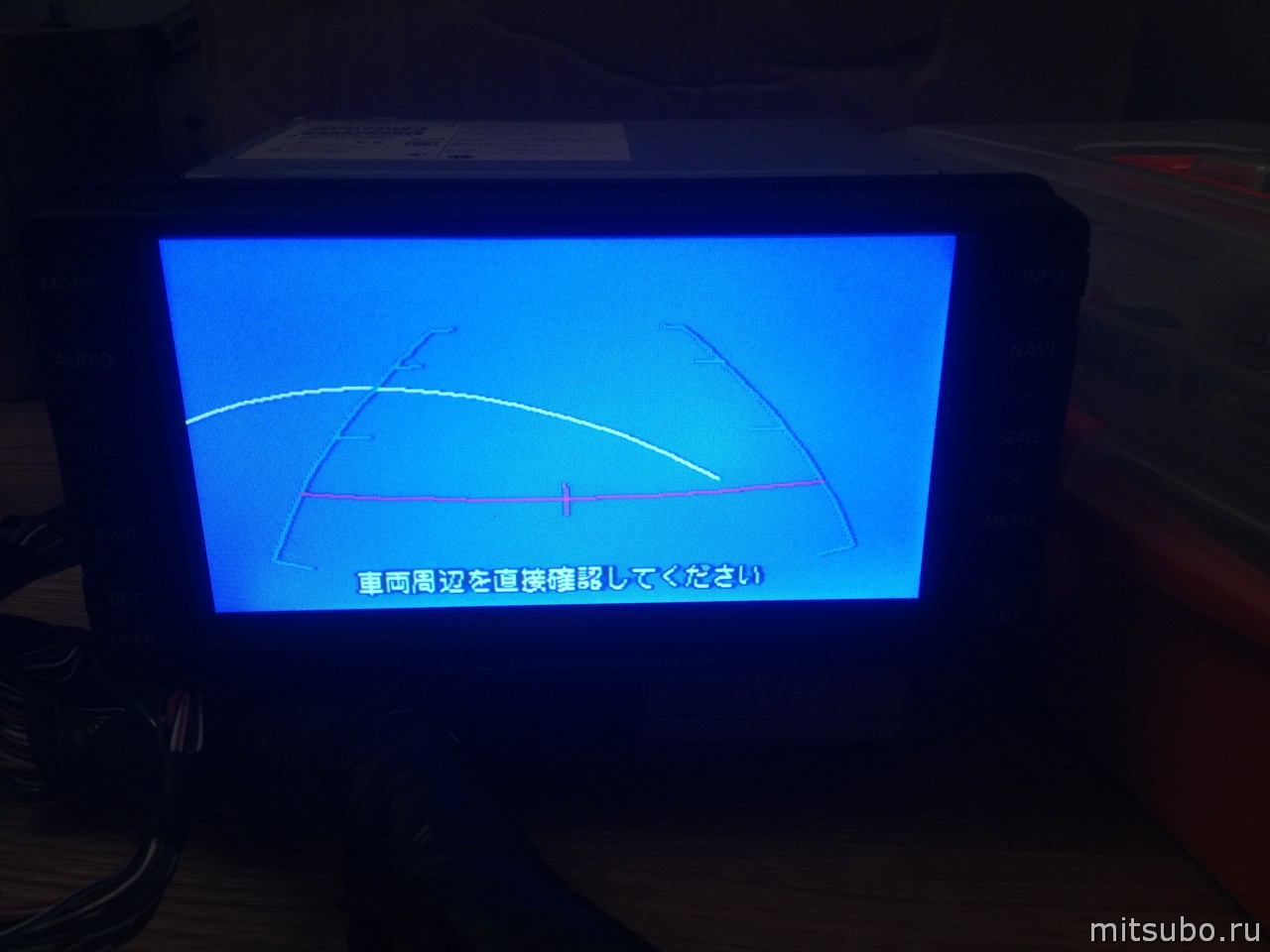
Оказалось, что линии парковки просчитываются математически, а не заложены в прошивку виде картинок. Поэтому есть возможность вывернуть их чуть ли не на 360 градусов. Вот одно из промежуточных значений:
После написания прошивки подключил все в машине
Осталось лишь путем экспериментов подобрать нужный коэффициент модификации, либо же составить тарировочную таблицу. Конечно, идеального совпадения линий с траекторией автомобиля ждать не стоит, но можно попробовать приблизить эти значения.
Небольшое видео с демонстрацией возможности настройки:



Здравствуйте. Сможете помочь советом за компенсацию :) Я сам с Красноярска. Купил себе delica d5 без камер и мафон был не родной, замутил на разборке магнитолу от ASX mmsc-j5 с can модулем купил штатную камеру заднию и блок для управления ими , разблокировали диск залил прошивку универсальную. Всё на русском. И вот тут собственно вопрос как это все скрестить, пробка от моей машины отличается от той что мне нужно, например не могу получать информацию с компа автомобиля, (не как не могу запомнить правильное название его :)) и нужна распиновка кабеля от блока управления до ГУ. информации в интернете куча все вразброс не как не могу акоммулировать все и разобратся. Не могли бы вы подсказать или может у вас есть наработки в этом направлении, судя по вашему блогу вы в этом преуспели. Могу оплатить вашу интеллектуальный труд, сам что то очкую спалить что нить.
Здравствуйте. Уточните, каких разъемов не хватает в проводке? Вот здесь я выкладывал схему подключения блока: https://mitsubo.ru/shema-podklyucheniya-sistemy-krugovogo-obzora-delica-d-5/